Como fazer o cabeamento de um robo para FRC¶
Note
Este documento descreve como fazer o cabeamento de uma chapa com componentes eletrônicos para testes.
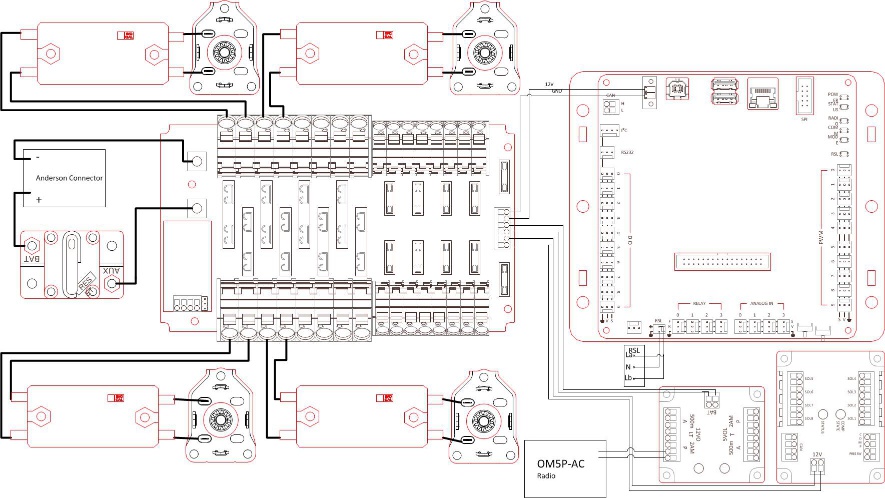
Algumas das imagens presentes nessa seção demonstram o Setup do sistema de controle de um robô que utiliza controladores de motor Spark. Os diagramas e layouts do cabeamento a seguir são bem parecidos com o dos demais controladores. Há também um segundo set de imagens que demonstram o passo a passo do cabeamento de controladores PWM com fios integrados.
Materiais e componentes¶
Você vai precisar dos seguintes componentes eletrônicos e ferramentas
Mateirais do KIT:
Power Distribution Panel (PDP)
roboRIO
Pneumatics Control Module (PCM)
Voltage Regulator Module (VRM)
OpenMesh radio (com seu cabo de alimentação POE)
Robot Signal Light (RSL)
4x Victor SPX ou outro controlador de motor
120A Circuit breaker
4x 40A Circuit breaker
Fio vermelho e preto de 6 AWG (4,1mm de seção)
Fio vermelho e preto de 10 AWG (2,5mm de seção)
Fio vermelho e preto de 18 AWG (1mm de seção)
Fio amarelo e verde de 22AWG
16x 10-12 AWG terminais em olho (amarelos)
2x Anderson SB50
Terminais em olho de 6 AWG
Baterida 12V
Fita isolante
Zip ties
Compensado de 1/2” ou 1/4”. Ou Policarbonato
Ferramentas nescessaárias:
Chave de fenda pequena
Chave de fenda muito pequena (do tipo utilizdado em ajuste de óculos)
Chave Phillips
Chave Allen de 5mm
Chave Allen de 1/16”
Alicate desemcapador e de corte
Chave de boca de 7/16”
Construindo a base do para o Sistema de Controle¶
Para a produção da base, corte uma chapa (madeira ou plástico) de 1/4” ou 1/2” de espessura e aproximadamente 24” x 16”. Se for o caso de um chassi pré-fabricado, consulte a documentação e verifique o tamanho ideal para a configuração do chassi correspondente.
Organize os principais componentes do Sistema de Controle¶
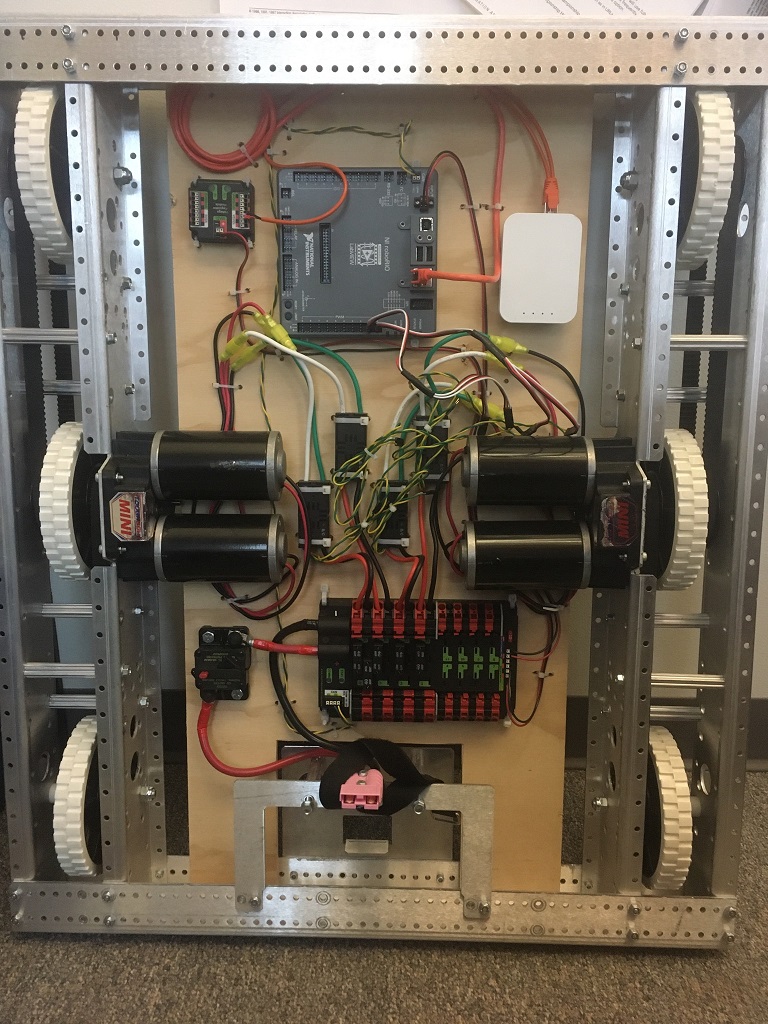
Organize os componentes na chapa. O layout da imagem acima é um bom exemplo.
Fixe os componentes¶
Utilizando fitas dupla-face (VHB por exemplo) ou ZIP ties, prenda todos componentes à base. Tenha em mente que, em muitos dos jogos da FRC, há constante toque físico entre os robôs. Muitos times optam por utilizar fitas dupla face e, principalmente, ZIP ties para garantir a fixação apropriada dos componentes.
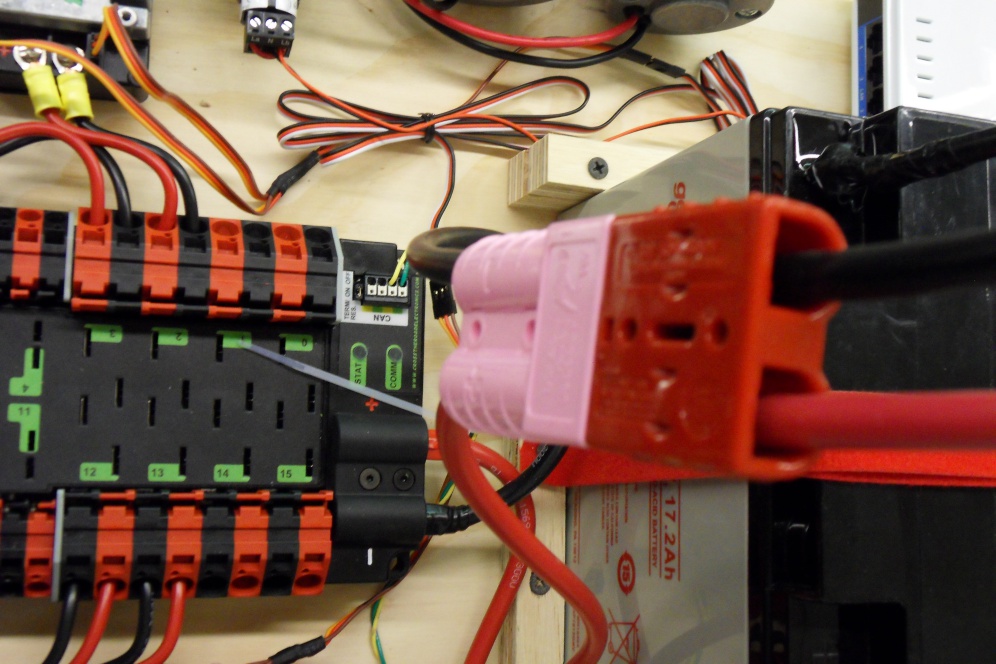
Fixe o conector da bateria à PDP¶

Requer: Conector Anderson, Terminal olho de 6AWG , Allen de 1/16”, Alle de 5mm e a chave de boca 7/16”
Prenda os terminais em olho ao Conector da bateria:
Utilizando a Allen 1/16”, retire os dois parafusos que prendem a proteção dos terminais da PDP.
Utilizando a Allen 5mm, remova o parafuso e a arruela que que fica rosqueadas ao o polo negativo da PDP e prenda o terminal negativo do conector da bateria.
Utilizando a chave de boca 7/16”, remova a proteção de borracha e a porca do parafuso do Disjuntor principal, encaixe o terminal positivo do conector de bateria e prenda-o bem com a porca.
Conecte o Disjuntor principal à PDP¶
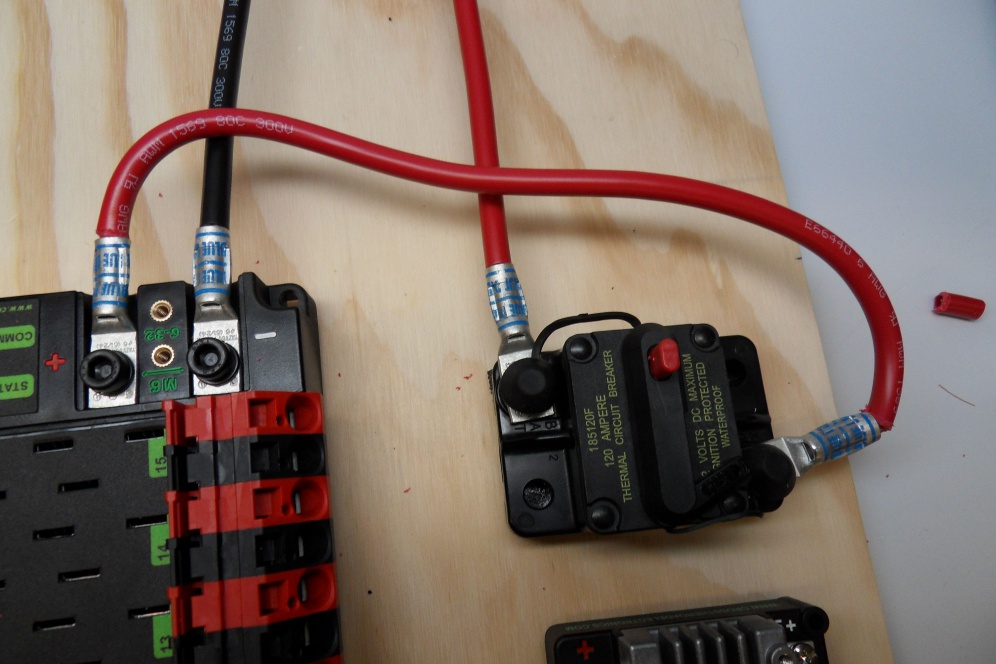
Requer: Fio vermelho de 6AWG, 2x terminais olho de 6AWG, Allen de 5mm e a chave de boca 7/16”.
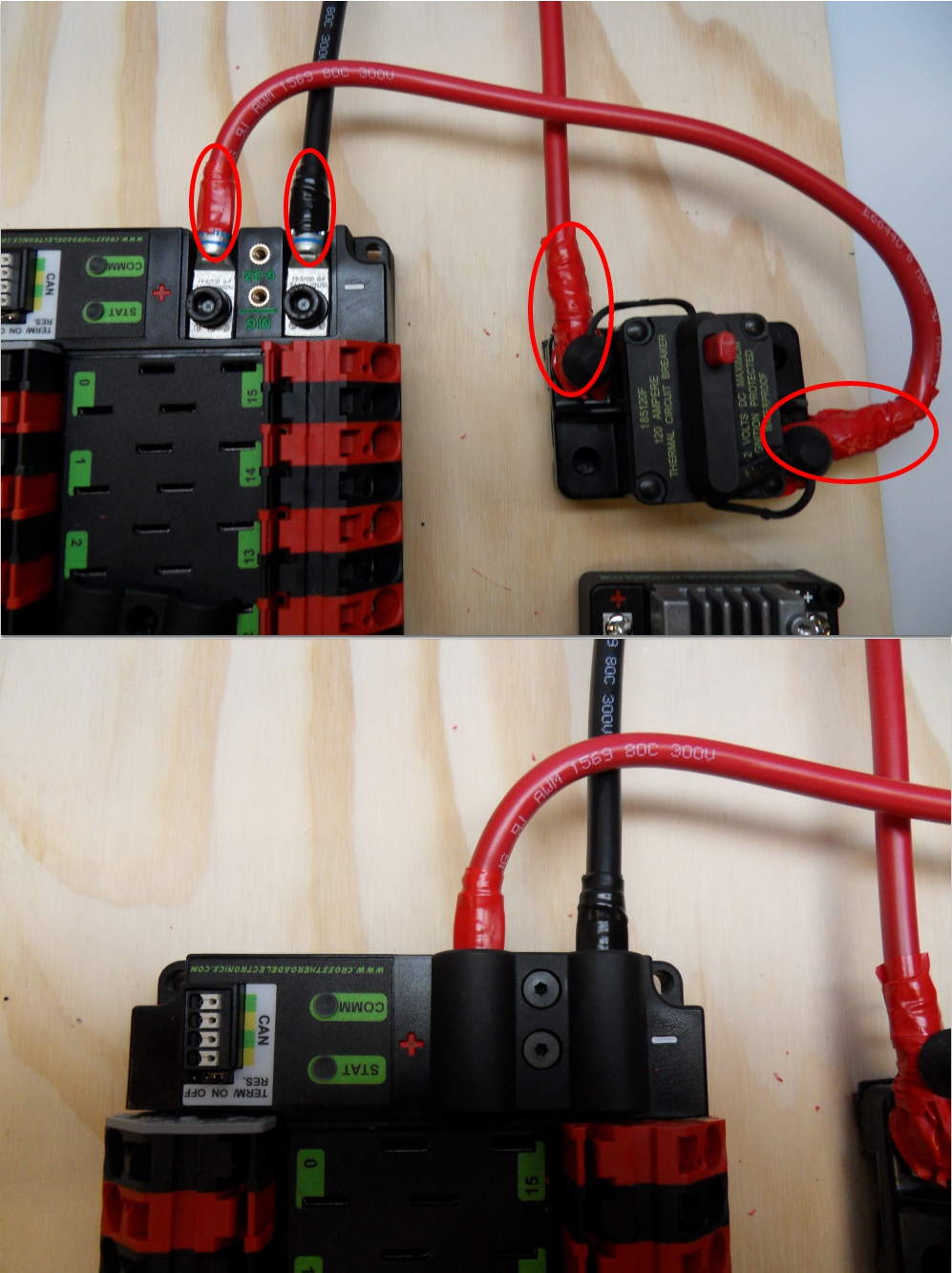
Crimpe um terminal olho na ponta do fio vermelho de 6AWG. Retire a porca rosqueada ao parafuso do lado “AUX” do disjuntor principal (utilizando a chave de boca 7/16”), encaixe o terminal do cabo no parafuso e rosqueie a porca, prendendo-o. Meça o comprimento nescessário para que o cabo chegue ao terminal positivo da PDP.
Corte, encaixa e crimpe o terminal ao outro lado do fio vermelho de 6AWG.
Utilizando a chave de boca 7/16”, prenda o fio ao lado “AUX” do disjuntor principal de 120A.
Utilizando a Allen de 5mm, prenda a outra ponta ao teminal positivo da PDP.
Isole as conexões da PDP¶
Requer: Allen 1/16”, Fita isolante
Utilizando a fita isolante, isole as duas conexões do disjuntor principal. Isole a parte dos terminais da PDP que irão entrar em contato com a proteção quando for presa novamente. Uma maneira de isolar as conexões do disjuntor principal é passar a fita no cabo e na porca antes de serem presos e, depois de presos, passar fita novamente.
Utilizando a Allen de 1/16”, prenda a proteção dos terminais à PDP.
Conectores Wago¶
O próximo passo é aprender a utilizar os conectores Wago na PDP. Para utiliza-los, pegue uma pequena chave de fenda e a insira no buraco retangular (na lateral da PDP) o mais horizontal possível. Empurre a chave para cima, aí você vai poder ver que, abaixo do buraco retangular, uma pequena entrada vai se abrir. Nessa entrada devem ser presos os cabos dos componentes a serem energizados. A PDP têm dois tipos de conectores:
Conector Wago pequeno: Aceita 10AWG-24AWG, strip 11-12mm (~7/16”)
Conector Wago grande: Aceita 6AWG-12AWG, strip 12-13mm(~1/2”)
Para facilitar a entrada do cabo na entrada da PDP, deve deixar a parte de cobre exposta bem esticada (não torcida, de preferencia).
Energizando controladores de motor¶

Requer: Alicate para desencapar fios, Chave de fenda pequena, fio de 10 ou 12 AWG, terminal olho de 10 ou 12, aicate crimpador
Para o Victor SPX ou outro controlador de motor com fios integrados (imagem de cima): - Desencape a ponta dos cabos de energia (vermelho e preto) e insira na entrada (conector Wago) de 40 amperes da PDP.
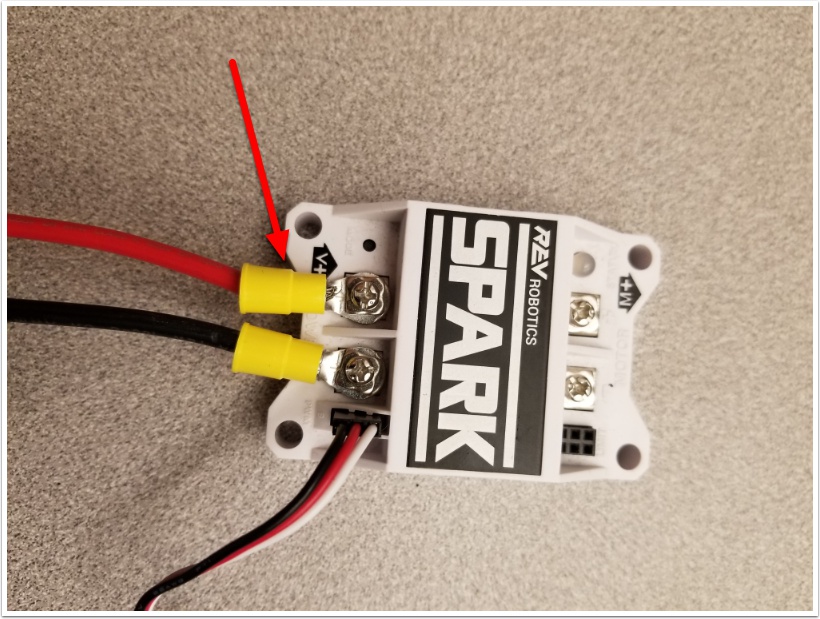
Para controladores de motor com terminais (imagem de baixo)
Corte um cabo vermelho e um cabo preto do tamanho apropriado para chegar até a entrada de 40 amperes da PDP (é recomendado que seja um pouco maior do que o necessário);
Insira a parte desencapada dos fios na PDP conforme a polaridade correspondente;
Crimpe um terminal olho na outra ponta do cabo;
Prenda os fios nos terminais dos controladores (vermelho no + e preto no -).
Conector Weidmuller¶
O tamanho correto para se desencapar é 5/16”(~8mm), e não 5/8” como dito no vídeo.
Para utilizar estes conectores de maneira mais eficiente, tenha em mente que:
O fio deve estar entre 16AWG e 24AWG (consulte as regras e verifique cada espessura de fio correspondente ao componente que será utilizado)
Deve-se desencapar aproximadamente 5/16”(~8mm) no final dos fios.
Para inserir ou remover os fios, pressione o botão correspondente para abrir o terminal.
Depois de conectar, cheque para ter certeza se está tudo certo:
Verifique se não à “pequenos fios” expostos para fora do terminal.
Puxe o fio para verificar se ele está bem preso. Se ele ceder, abra o terminal e prenda-o melhor ou desencape um pouco mais a ponta do fio.
Energizando RoboRIO¶
**Requer: Fusiveis automotivos de 10A e 20A, alicate desemcapador, chave fenda bem pequena, fios vermelho e preto de 18 AWG (1mm de seção) **
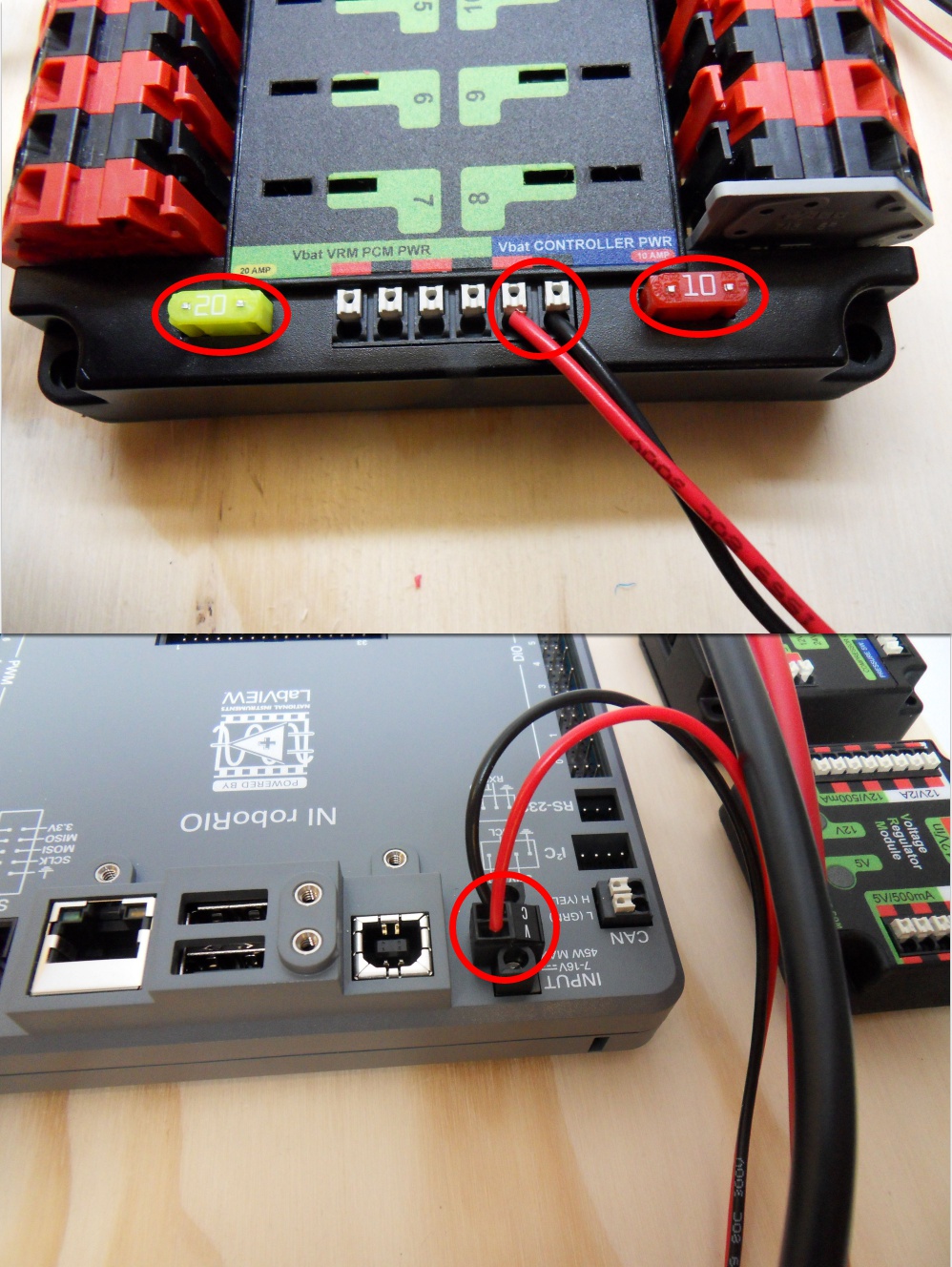
Insira os fusíves de 10 e 20 amperes na PDP nos lugares demonstrados na imagem acima.
Desencape as pontas dos fios de 18 AWG (1mm de seção) vermelho e preto e conecte aos terminais “Vbat Controller PWR” na PDP.
Meça o comprimento nescessário dos fios para chegarem do RoboRio a PDP. Tome cuidado ao fazer o caminho desses fios, não passe por nenhum lugar que possa causar problemas.
Corte e desencape-os, adicionando o conector tubular em suas pontas.
Utilizando uma pequena chave de fenda, conecte os fios no terminal do RoboRIO (Vermelho no V e preto no C). Tenha certeza que o terminal está vem preso ao RoboRIO.
Energizando Voltage Regulator Module (VRM)¶

Requer: alicate desemcapador, chave de fenda pequena, fio vermelho e preto de 18 AWG (1mm de seção) red and black wire:
Desencape ~5/16” da ponta de um cabo vermelho e um cabo preto 18 AWG (1mm de seção).
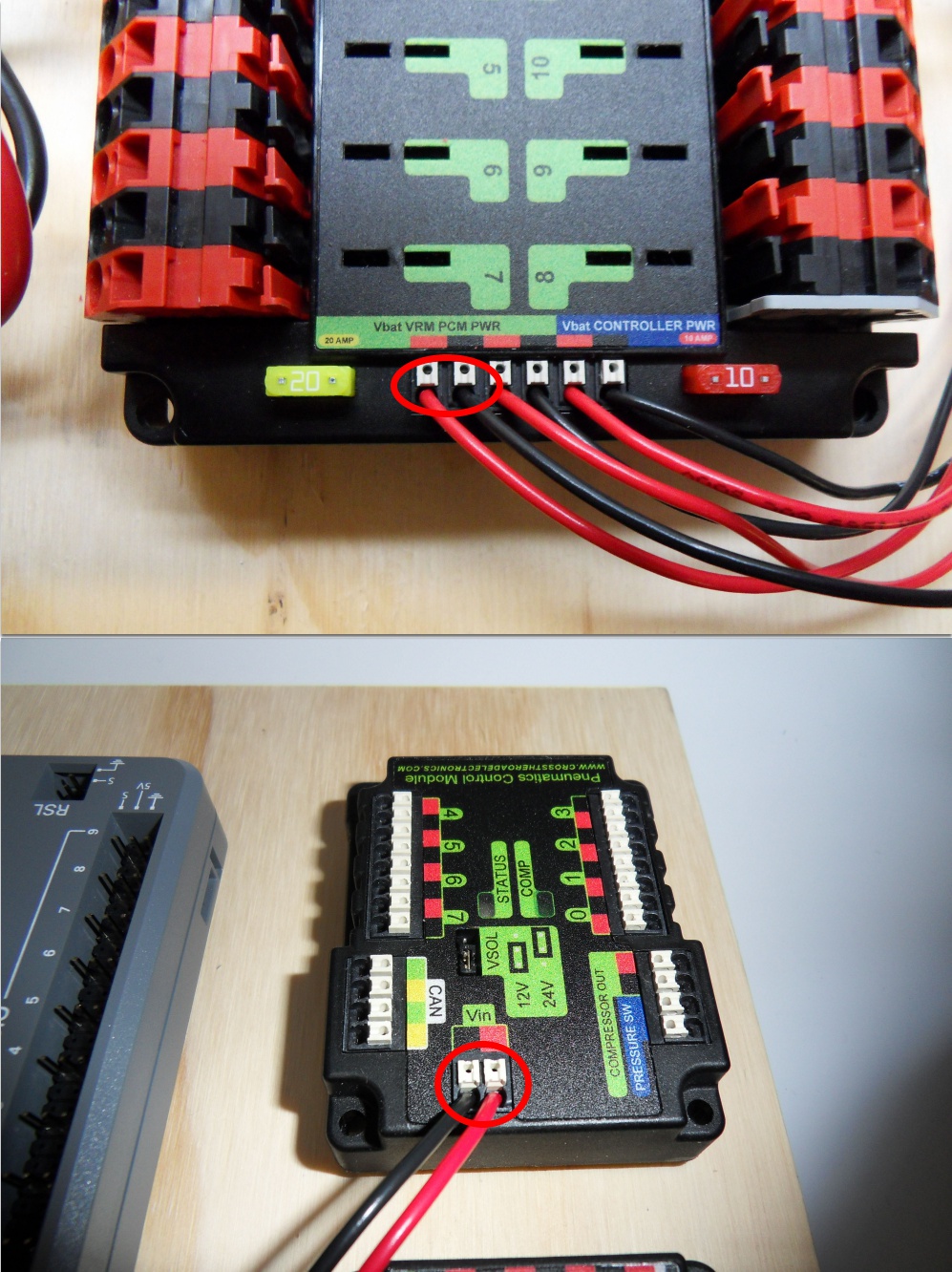
Conecte os fios à um dos dois pares de terminais da PDP com o nome de “Vbat VRM PCM PWR”.
Meça o tamanho nescessário para chegar ao terminal “Vin” da PCM. Tome cuidado ao fazer o caminho desses fios, não passe por nenhum lugar que possa causar problemas.
Corte os cabos do tamanho correto e desencape as pontas encapadas.
Conecte os fios ao terminal 12Vin da VRM.
Energizando Pneumatics Control Module (PCM) (opcional)¶
Requer: Alicate desemcapador, chave de fenda pequena, cabo vermelho e preto de 18 AWG (1mm de seção)
Note: A PCM é um componente opcional, utilizado para controlar os sistemas pneumáticos do robô.
Desencape ~5/16”(~8mm) da ponta de um cabo vermelho e um cabo preto de 18 AWG (1mm de seção).
Conecte os fios à um dos dois pares de terminais da PDP com o nome de “Vbat VRM PCM PWR”.
Meça o tamanho nescessário para chegar ao terminal “Vin” da PCM. Tome cuidado ao fazer o caminho desses fios, não passe por nenhum lugar que possa causar problemas.
Corte os cabos do tamanho correto e desencape as pontas encapadas.
Conecte os fios ao terminal 12Vin da PCM.
Ethernet e energia do rádio¶
Warning
NÃO conecte o POE diretamente ao RoboRIO. Você deve utilizar um CABO ETHERNET que faça a ponte entre o POE e o RoboRIO.
Requer: Chave de fenda pequena, Cabo PoE incluso no Kit
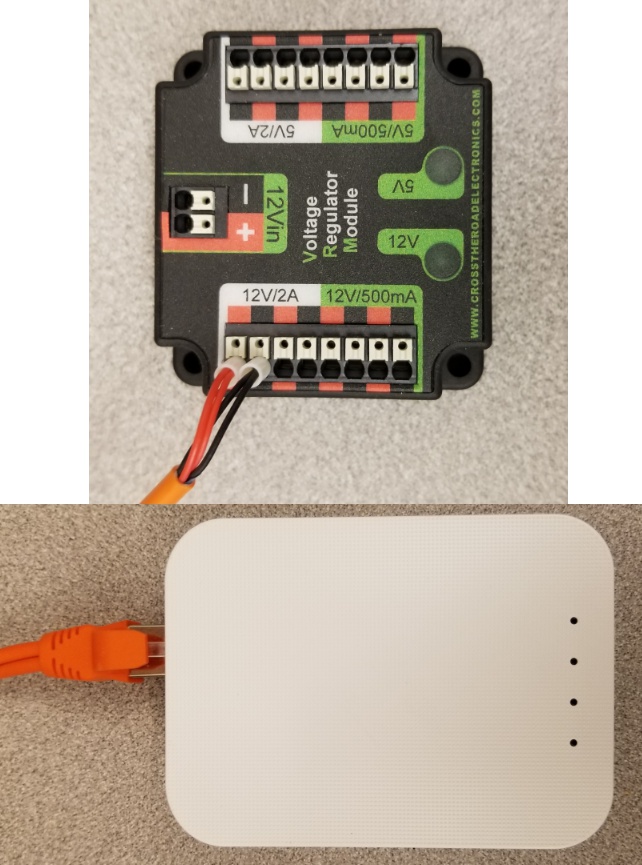
Insira os conectores do PoE nos terminais correspondentes a 12V/2A da VRM.
Conecte o conector macho de Ethernet (RJ45) à porta de ethernet do rádio mais próxima da entrada do pino de energia (com o nome de 18-24v POE).
ATENÇÂO: Não conecte mais nada no barramento 12V/2A da VRM, as 2 portas devem ser utilizadas apenas e exclusivamente para o rádio.
Conectando o rádio ao RoboRIO¶
Requer: Cabo Ethernet
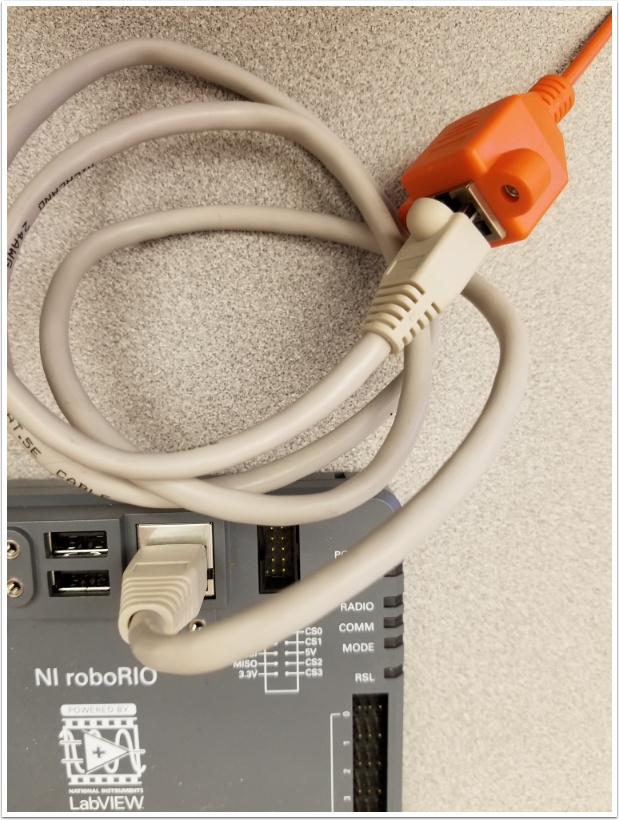
Conecte o cabo de Ethernet na porta RJ45 do cabo POE e na entrada Ethernet (RJ45) do RoboRIO.
Dispositivos CAN¶
CAN do RoboRIO para a PCM¶
Requer : Alicate desemcapador, chave de fenda pequena, fios verde e amarelo de 22 AWG
A PCM é um compinente opcional, utilizado para controlar os sistemas pneumáticos do robô. Se não estiver utilizando uma PCM, conecte os fios CAN que vem do RoboRIO diretamente na PDP.
Desencape ~5/16”(8mm) de cada fio CAN.
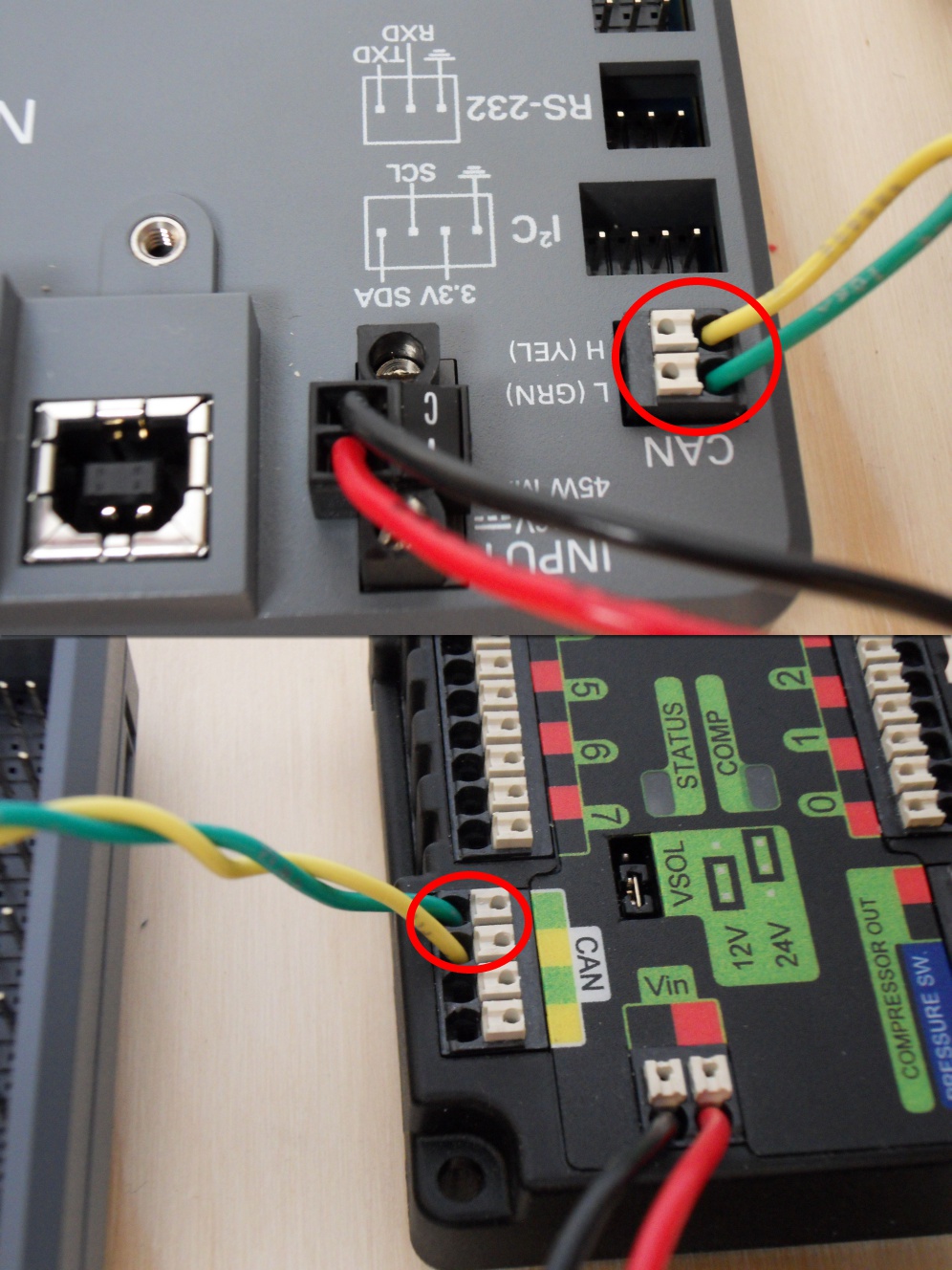
Insira os fios nos terminais destinados à linha CAN no RoboRIO (Amerelo -> YEL, Verde -> GRN).
Meça o comprimento nescessário dos cabos para chegar com um pouco de folga na PCM.
Insira os fios CAN no terminal destinado à eles. Pode utilizar qualquer um dos pares de terminais CAN (Amarelo/Verde).
CAN da PCM para a PDP¶
Requer : Alicate desemcapador, chave de fenda pequena, fios verde e amarelo de 22 AWG
A PCM é um componente opcional, utilizado para controlar os sistemas pneumáticos do robô. Se não estiver utilizando uma PCM, conecte os fios CAN que vem do RoboRIO diretamente na PDP.
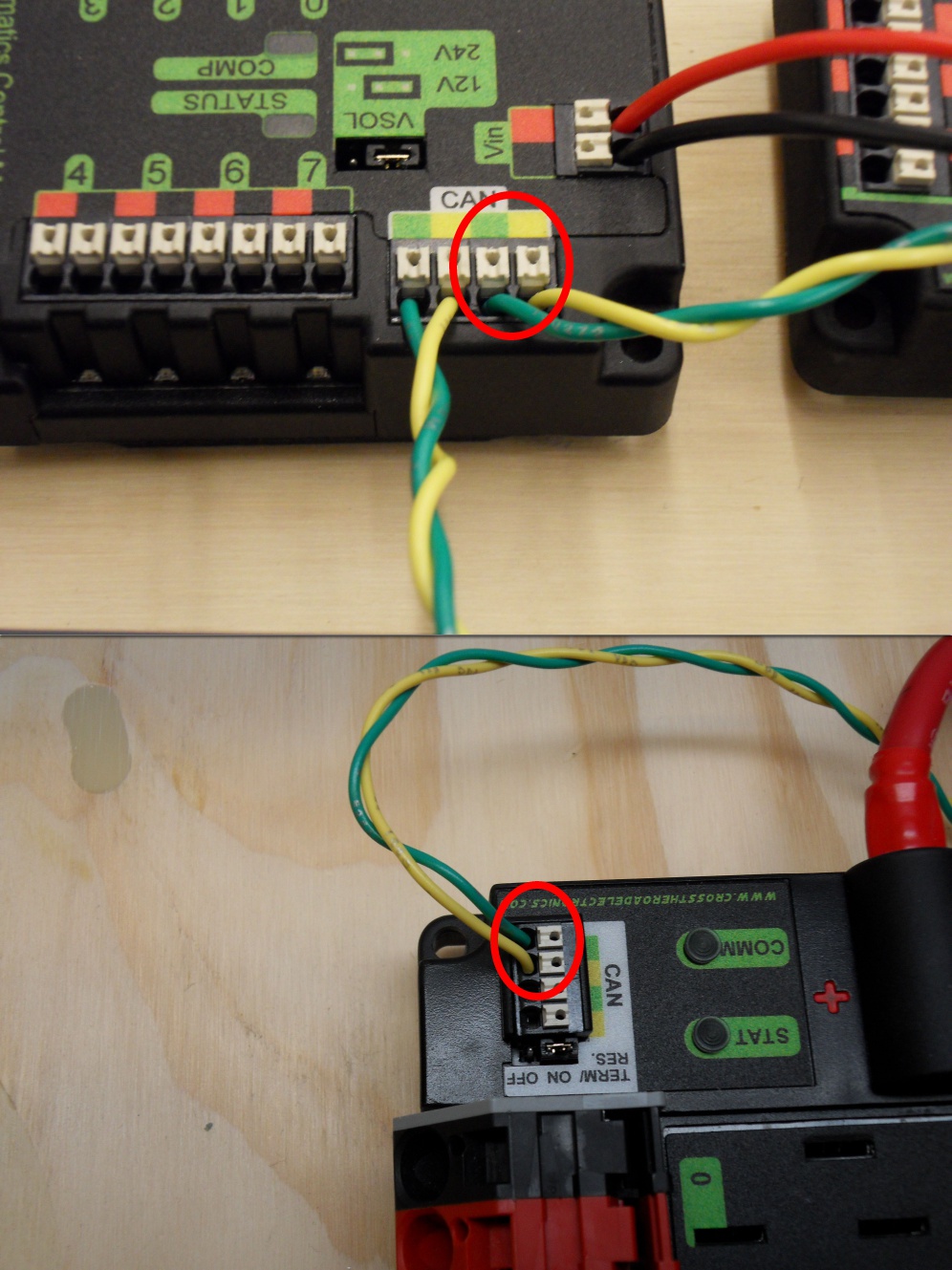
Insira os fios nos terminais CAN da PCM
Meça o comprimento dos fios para que consigam chegar até a PDP (cada um deles).
Insira os fios nos terminais CAN da PDP. Pode usar qualquer um dos dois pares da entrada.
Utilize a PDP como o último componente da linha CAN (CAN bus)
Cabos PWM¶
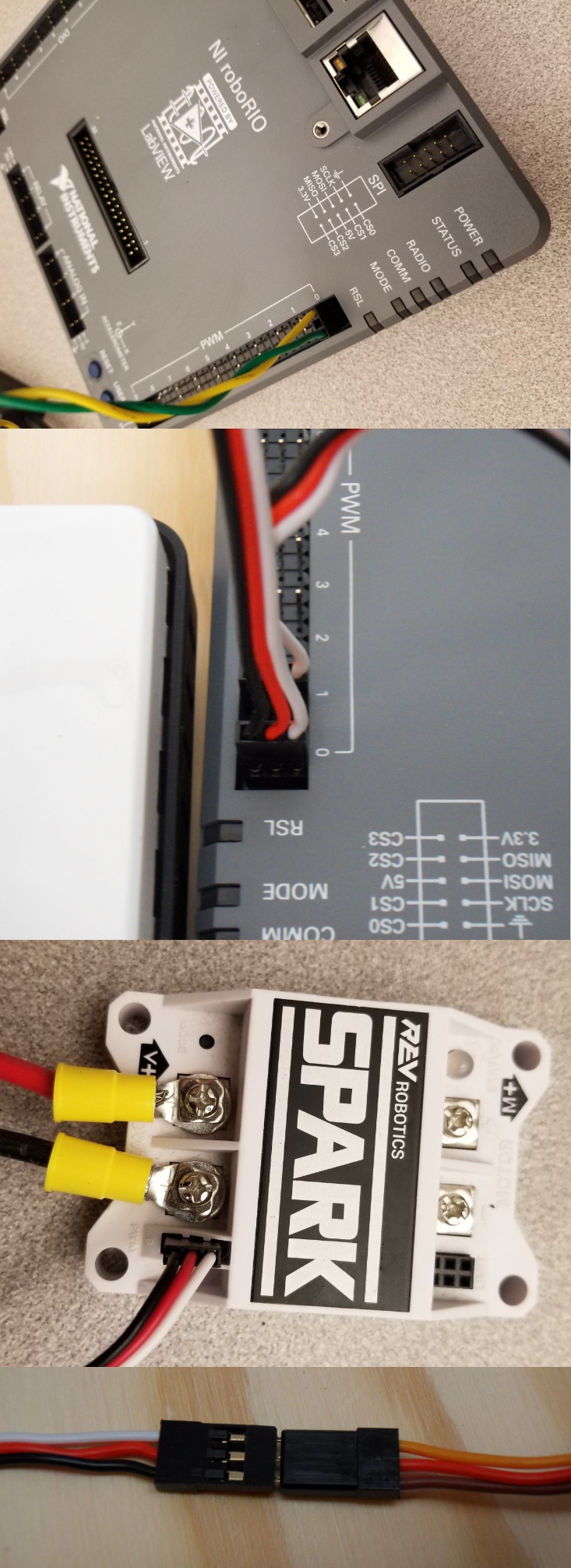
Requer: 4x PWM se não estiver utilizando controladores com cabos integrados, 2x PWM Y-cable (Opcional)
Opção 1 (conectar diretamente):
Conecte os cabos PWM de cada controlador diretamente no RoboRIO. Para o Victor SPX e outros controladores PWM/CAN, o fio verde (fio preto para controladores com fios não integrados) deve estar conectado na parte mais próxima da borda do RoboRIO. Para controladores com fios não integrados, tenha certeza de que o fio preto esteja conectado conforme o controlador indica.
Opção 2 (cabo Y)
Conecte 1 cabo PWM Y aos cabos PWM dos contoladores que controlam um lado do robô. O fio marrom do cabo Y deve corresponder ao fio verde/preto do cabo PWM do controlador.
Conecte os cabos PMW Y às portas PWM do RoboRIO. O fio marrom deve ser conectado ao lado mais próximo à borda do RoboRIO. É recomendado que se conecte o lado esquerdo ao PWM 0 e o lado direito ao PWM 1 para ajudar na organização durante a programação, mas fique atento: As entradas devem estar de acordo com o lado do robô que lhes fora designado.
Robot Signal Light (RSL)¶
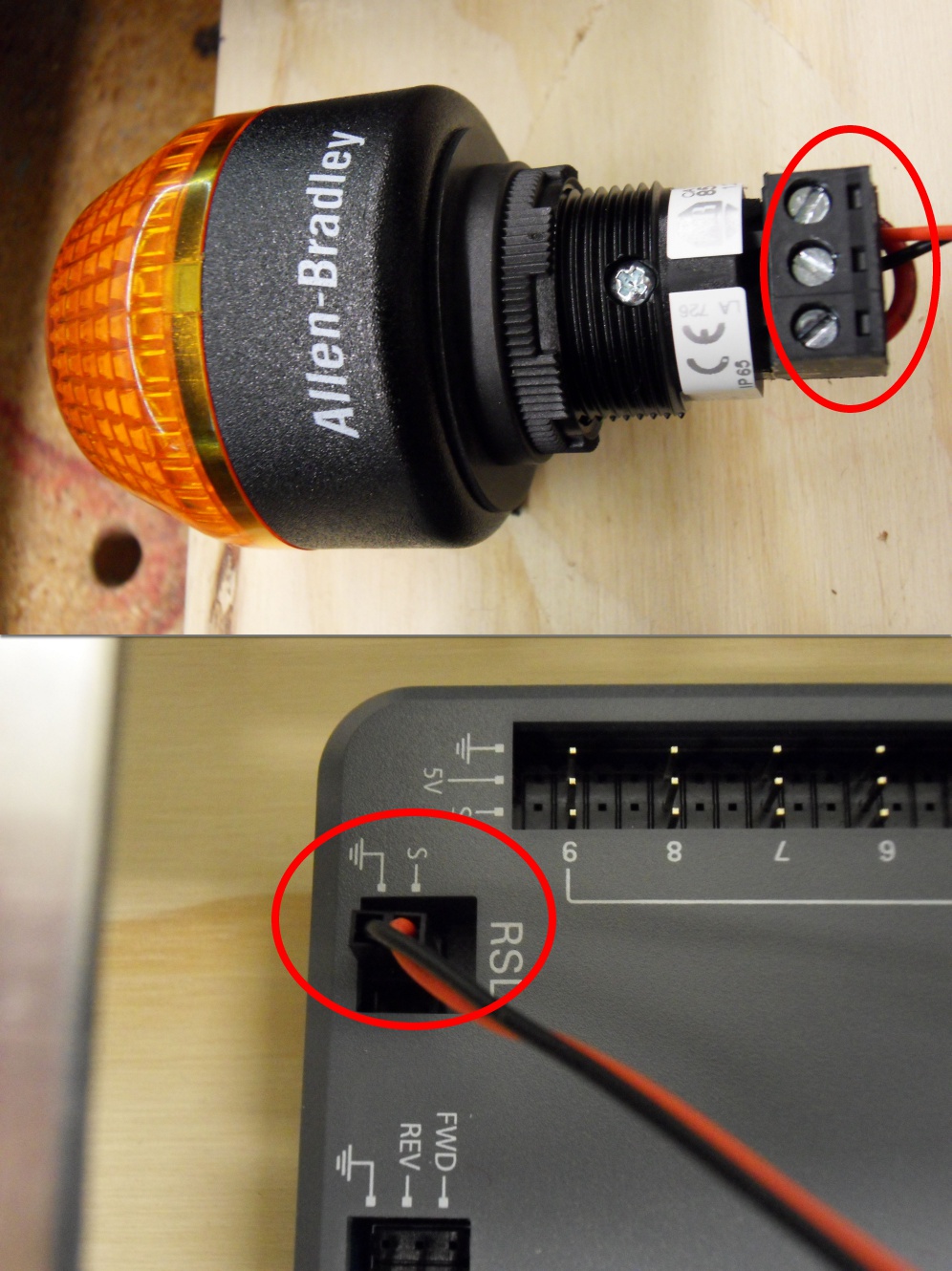
Requer: Alicate desemcapador, cabo de 2 vias, Robot Signal Light, fio vermelho de 18 AWG (1mm de seção) e chave de fenda pequena.
Desencape a ponta de um cabo preto e um cabo vermelho e prenda um conector tubular em cada um;
Insira o cabo preto no terminal do centro (N), e prenda-o (aperte o parafuso do terminal);
Corte um pequeno cabo vermelho 18 AWG (1mm de seção), insira uma das pontas no terminal “La” e prenda-o, insira a outra ponta no terminal “Lb”, mas ainda não prenda;
Insira o cabo vermelho com o conector tubular no terminal “Lb”, junto com o cabo vermelho pequeno e prenda-os;
Conecte os cabos com conector tubular na porta RSL do RoboRIO. O fio preto deve ser conectado à porta mais próxima da borda do RoboRIO.
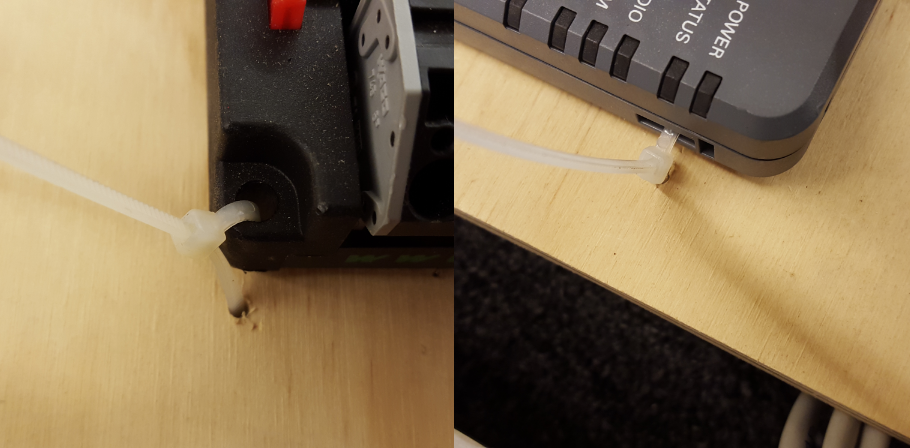
Você deve prender (temporariamente) a RSL à chapa/base utilizando zip ties ou Dual Shock (é muito importante que a RSL esteja presa em um local bem visível do robô).
Circuit Breakers / Fusíveis¶
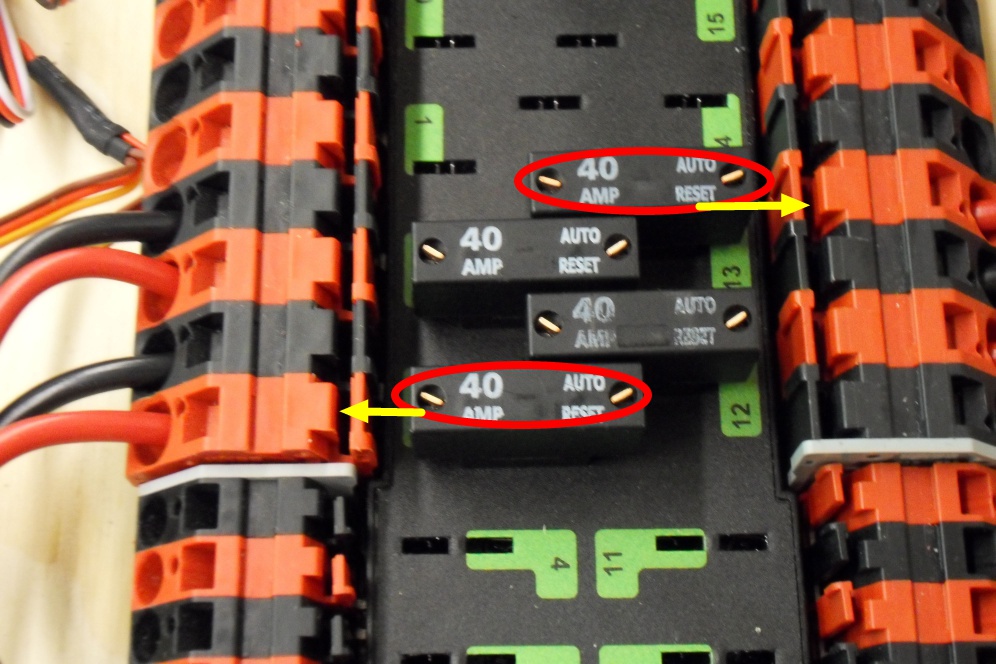
Requer: 4x 40A circuit breakers (fusível de 40 amperes)
Adicione um fusível de 40 amperes na posição correspondente onde os cabos do controlador estão conectados à PDP. Observe que as frestas para encaixar o fusível sempre estão ao lado da entrada positiva correspondente. Todos os terminais negativos estão conectados internamente..
Energizando motor¶
**Requer: Alicate desemcapador, crimpador, chave phillips, terminais de conexão entre cabos (terminais olho por exemplo).
Para cada CIM motor:
Estique os fios vermelhos e pretos de cada motor CIM
Para controladores com fios integrados (incluindo Victor SPX):
Deixe os cabos brancos e vermelhos do controlador esticados.
Conecte os fios do motor nos fios output/saída do controlador (é recomendado que conecte o fio vermelho ao fio branco M+).
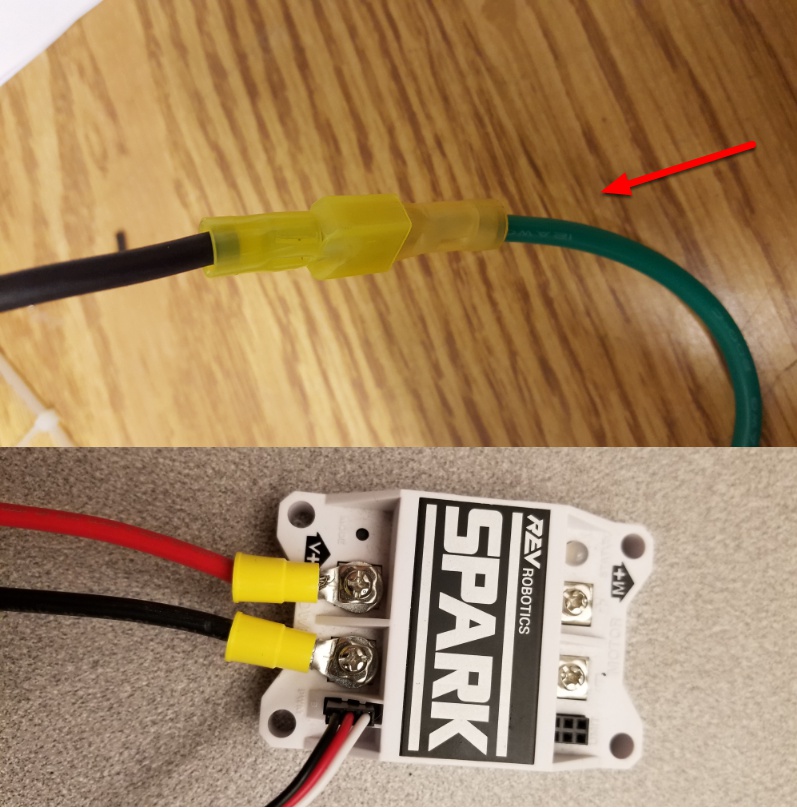
Para Sparks e outros controladores com fios não integrados:
Crimpe um terminal olho ou garfo em cada um dos fios (tanto dos motores quanto controladores).
Conecte os fios no output/saída de cada controlador de motor (vermelho no positivo, preto no negativo).
STOP¶

Danger
STOP!!
Danger
Antes de conectar a bateria, tenha certeza que todas as conexões estão com as polaridades corretas (positivo no positivo, negativo no negativo). Provavelmente devem ter algumas que não estão conectadas, cheque tudo.
Verifique se o fio vermelho está conectado ao terminal positivo da bateria.
Verifique se o fio vermelho está indo do main breaker para o terminal positivo da PDP e se o fio preto está indo para o terminal negativo.
Para cada controlador de motor, verifique se o fio vermelho que sai do terminal vermelho da PDP está conectado com o fio vermelho do Victor SPX (não o M+ branco!!!!)
Para cada componente que está ligado à PDP, verifique se o fio vermelho que sai do terminal vermelho da PDP se conecta com o terminal positivo do componente.
Tenha certeza de que o conector PoE está conectado diretamente ao rádio, NÃO AO RoboRIO! Para conectar no RoboRIO, deve ser utilizado um cabo Ethernet adicional.
É recomendado que o robô esteja com as rodas suspensas para prevenir acidentes se o robô se movimentar de maneira inesperada.
Organize os fios¶
Requer: Zip ties
Essa é a hora de adicionar alguns zip ties aos fios. Isso fará com que os fios do robô se mantenham firmes e organizados.
Conecte a bateria ao robô com o conector Anderson. Para ligar o robô, empurre a “alavanca” do disjuntor principal até ela dar um estalo e ficar presa. Se as os eletrônicos começarem a piscar, provavelmente está tudo certo. Agora conecte o RoboRIO ao computador e tente passar o código!