Visão geral do Hardware do Sistema de Controle de FRC®¶
O objetivo desse documento é fornecer uma breve visão geral dos componentes de hardware que compõem o Sistema de Controle de FRC®. Cada componente vai conter uma breve descrição da função do componente, uma breve lista de conexões críticas, e um link para mais documentação se disponível.
Note
Para instruções/diagramas de fiação completos, acesse o documento Fiação do Sistema de Controle.
National Instruments roboRIO¶
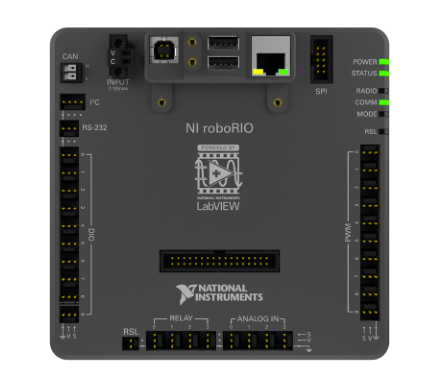
O NI-roboRIO é o principal controlador de robô usado para FRC. O roboRIO inclui um processador dual-core ARM Cortex™-A9 e FPGA que executa os elementos confiáveis para controle e segurança, bem como o código gerado pela equipe. O Controlador integrado I/O inclui uma variedade de protocolos de comunicação (Ethernet, USB, CAN, SPI, I2C, e serial) como PWM, servo, digital I/O, e canais analógicos I/O usados para conectar os periféricos do robô para detecção e controle. O roboRIO deve conectar-se à porta de 12V no power distribuition panel. A comunicação com fio está disponível via USB ou Ethernet. Informações detalhadas sobre o roboRIO podem ser encontradas no Manual do Usuário do roboRIO.
Power Distribution Panel¶

A Power Distribution Panel (PDP) foi projetada para distribuir energia de uma bateria 12VDC para vários componentes do robô por meio de disjuntores com redefinição automática e um pequeno número de conexões com funções especiais. A PDP oferece 8 pares de saída classificados para corrente contínua de 40A e 8 pares classificados para corrente contínua de 30A. A PDP oferece conectores dedicados de 12V para o roboRIO, bem como conectores para o Voltage Regulator Module (VRM) e para o Pneumatics Control Module (PCM). Ela também inclui uma interface CAN para registrar a corrente, temperatura e tensão da bateria. Para informações mais detalhadas, consulte o PDP User Manual.
Pneumatics Control Module¶

A PCM é um dispositivo que contém todas as entradas e saídas necessárias para operar solenóides pneumáticas de 12V ou 24V e o compressor. A PCM é ativada/desativada pelo roboRIO através da interface CAN. A PCM contém uma entrada para o sensor de pressão e controlará o compressor automaticamente quando o robô estiver ativado e uma solenóide tiver sido criado no código. O dispositivo também coleta informações de diagnóstico, como o estado das solenóides, o estado do sensor de pressão, e o estado do compressor. O módulo inclui LEDs de diagnóstico para os canais de solenóide e CAN individualmente. Para mais informações, consulte o Manual do Usuário da PCM.
Voltage Regulator Module¶
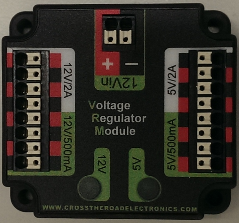
O VRM é um módulo independente que é alimentado por 12 volts. O dispositivo está conectado a um conector dedicado a ele na PDP. O módulo possui várias saídas reguladas de 12V e 5V. O objetivo do VRM é fornecer energia regulada para o rádio do robô, circuitos personalizados e câmeras de visão IP. Os dois pares de conectores associados a cada etiqueta têm uma classificação combinada do que a etiqueta indica (por exemplo, 5V / 500mA total para ambos os pares, não para cada par). O limite de 12V / 2A é uma classificação de pico, a fonte não deve ser carregada com mais de 1,5A de corrente contínua. Para mais informações, consulte o Manual do Usuário do VRM.
Controladores de Motor¶
Há uma variedade de controladores de motor diferentes que funcionam com o sistema de controle FRC e são aprovados para uso. Esses dispositivos são usados para fornecer controle de tensão variável dos Brushed DC Motors usados na FRC. Eles estão listados aqui em ordem alfabética.
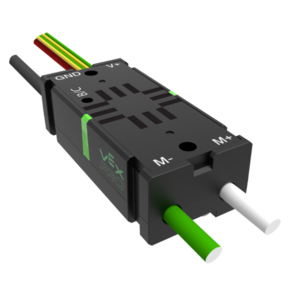
Controlador SPARK Motor¶

O Controlador SPARK Motor da REV Robotics é um controlador Speed Motor para uso na FRC. O SPARK é controlado utilizando a interface PWM. Os Limit switches podem ser conectados diretamente ao SPARK para limitar o deslocamento do motor em uma ou ambas as direções. O LED de status RGB exibe o estado atual do dispositivo, incluindo se o dispositivo está atualmente em Brake mode ou Coast mode. Para mais informações, acesse o Página do produto REV Robotics SPARK
SPARK MAX Motor Controller¶

O Controlador SPARK MAX Motor da REV Robotics é um controlador Speed Motor para uso na FRC. O SPARK MAX é capaz de controlar tanto os tradicionais Brushed DC Motors comumente usados na FRC ou o novo Brushless REV Robotics NEO Brushless Motor. O SPARK MAX pode ser controlado por meio da PWM, CAN ou USB (para configuração/testagem apenas). O controlador possui uma porta de dados para entrada do sensor e é capaz de assumir modos de closed loop control quando controlado por meio CAN ou USB. Para mais informações, acesse Página do Produto REV Robotics SPARK MAX.
Controlador Talon Motor¶

O Controlador Talon Motor pela Cross the Road Electronics é um controlador Speed Motor para uso na FRC. O Talon é controlado por meio de interface PWM . O Talon deve ser conectado a uma saída PWM do roboRIO e alimentado pela Power Distribution Panel. Para mais informações, acesse o Manual do Usuário do Talon.
Talon SRX¶

O Controlador Talon SRX motor é um “controlador de motor inteligente” habilitado para CAN da Cross The Road Electronics/VEX Robotics. O Talon SRX possui um compartimento de metal eletricamente isolado para dissipação de calor, tornando opcional o uso de um ventilador. O Talon SRX pode ser controlado por meio CAN bus ou por interface PWM. Ao usar o controle CAN bus, esse dispositivo pode receber entradas de limit switches e potentiometers, encoders, ou sensores similares para executar um controle avançado como limitar ou PID(F) closed loop control no dispositivo. Para mais informações acesse o Manual do Usuário do Talon SRX.
Controlador Victor 888 Motor / Controlador Victor 884 Motor¶

O Controlador Victor 888 Motor da VEX Robotics é um controlador Speed Motor para uso na FRC. O Victor 888 substitui o Victor 884, que também pode ser utilizado na FRC. O Victor é controlado por interface PWM. O Victor deve ser conectado a uma saída PWM output do roboRIO e alimentado pela Power Distribution Panel. Para mais informações, acesse o Manual do Usuário do Victor 884 e Manual do Usuário do Victor 888.
Victor SP¶

O Victor SP motor é um controlador PWM da Cross The Road Electronics/VEX Robotics. O Victor SP possui uma carcaça de metal eletricamente isolada para dissipação de calor, tornando opcional o uso do ventilador. O dispositivo é selado para impedir que detritos entrem no controlador. O controlador é aproximadamente metade do tamanho dos modelos anteriores.
Victor SPX¶
O Victor SPX motor é um controlador de motor por meio CAN ou PWM da Cross The Road Electronics/VEX Robotics. O dispositivo é conectado para permitir a fácil conexão com o os conectores roboRIO, PWM ou CAN bus chain. Quando controlado por meio CAN bus, o dispositivo tem um número de recursos de closed loop também presente no Talon SRX. O dispositivo é selado para impedir que detritos entrem no controlador. Para mais informações, acesse a Victor SPX Webpage.
Spike H-Bridge Relay¶

O Spike H-Bridge Relay da VEX Robotics é um dispositivo usado para controlar a energia de motores ou outros componentes eletrônicos de robôs personalizados. Quando conectado a um motor, o Spike oferece On/Off control nas direções direta e reversa. As saídas do Spike outputs são independentemente controladas portanto também pode ser usado para fornecer energia para até 2 circuitos eletrônicos personalizados. O Spike H-Bridge Relay deve ser conectado a uma saída relay do roboRIO e alimentado pela Power Distribution Panel. Para mais informaçõ Guia do Uusário do Spike.
Servo Power Module¶

O Servo Power Module da Rev Robotics é capaz de expandir a energia disponível para os servos além do que a fonte de alimentação integrada do roboRIO é capaz. O Servo Power Module fornece até 90W de potência de 6V em 6 canais. Todos os sinais de controle são transmitidos diretamente do roboRIO. Para mais informações, acesse a Servo Power Module Webpage.
Microsoft Lifecam HD3000¶

A Microsoft Lifecam HD3000 é uma webcam USB que pode ser conectada diretamente ao roboRIO. A câmera é capaz de capturar vídeo de até 1280x720 a 30 FPS. Para mais informações sobre a câmera, consulte a Página do produto Microsoft. Para obter mais informações sobre o uso da câmera com o roboRIO, consulte a seção :ref:`Vision Processing <docs/software/vision-processing/index:Vision Processing>`deste documento.
OpenMesh OM5P-AN or OM5P-AC Radio¶

Ambos os OpenMesh OM5P-AN e OpenMesh OM5P-AC wireless radio são utilizados como o rádio do robô para fornecer funcionalidade de comunicação wireless ao robô. O dispositivo pode ser configurado como um ponto de acesso para conexão direta de um laptop para uso doméstico. Também pode ser configurado como Bridge para uso em campo. O rádio do robô deve ser alimentado por uma das saídas de 12V / 2A no VRM e conectado ao controlador roboRIO por Ethernet. Para mais informações, acesse Programando seu Rádio.
O OM5P-AN não está mais disponível para compra. O OM5P-AC é um pouco mais pesado, possui mais grades de resfriamento e possui uma textura superficial áspera em comparação com o OM5P-AN.
120A Circuit Breaker¶

O 120A Main Circuit Breaker oferece duas funções no robô: a principal power switch do robô e um dispositivo de proteção para a fiação e os componentes do robô. O disjuntor 120A é conectado aos terminais positivos da bateria do robô e dos quadros de distribuição de energia. Para mais informações, acesse a Ficha de dados Cooper Bussmann 18X Series (PN: 185120F)
Snap Action Circuit Breakers¶

As nap Action circuit breakers, MX5-A40 and VB3 series, são usadas com a Power Distribution Panel para limitar a corrente aos circuitos de derivação. A MX5-A40 40A MAXI style circuit breaker é usada com os canais maiores na Power Distribution Panel para alimentar cargas que consomem corrente de até 40A. A VB3 series são usados com os canais menores no PDP para alimentar os circuitos com corrente de 30 A ou menos. Para mais informações, acesse as fichas de dados para a MX5 series e VB3 Series.
Robot Battery¶
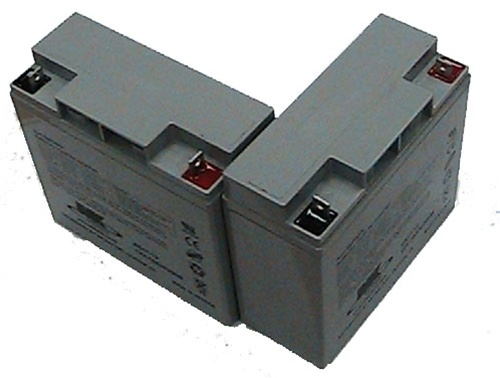
A fonte de alimentação de um robô de FRC é uma única bateria de 12V 18Ah. As baterias usadas para FRC são baterias de chumbo-ácido seladas, capazes de atender às altas demandas de corrente de um robô FRC. Para obter mais informações, consulte os dados para o MK ES17-12 e nersys NP18-12.
Note
Outros números de peça da bateria podem ser legais, consulte o Manual FRC para uma lista completa.
Crédito das Imagens¶
Imagem do roboRIO, cortesia da National Instruments. Imagens do Talon SRX, Victor 888, Victor SP, Victor SPX, e Spike H-Bridge Relay cortesia da VEX Robotics, Inc. Imagem do SPARK MAX cortesia da REV Robotics. Imagens da Lifecam, PDP, PCM, SPARK, e VRM cortesia da FIRST®. Todas as outras fotos são cortesia da AndyMark Inc.