LEDs¶
Os LEDs são comumente usados pelas equipes há vários anos por vários motivos. Eles permitem que as equipes depurem a funcionalidade do robô do público, forneçam um marcador visual para o robô e podem simplesmente adicionar algum apelo visual. O WPILib possui uma API para controlar os LEDs WS2812 com seus pinos de dados conectados via PWM.
Referenciando os LEDs¶
Você, primeiramente, cria um AddressableLED objeto que usa a porta PWM como argumento. Ele must ser um cabeçalho PWM no roboRIO. Depois, você define o número de LEDs localizados na sua faixa de LEDs, o que pode ser feito com a setLength() função.
Important
É importante notar que definir o comprimento do cabeçalho LED é uma tarefa cara e ele não recomendado para executar este periodicamente.
Depois que o comprimento da faixa for definido, você precisará criar um AddressableLEDBuffer objeto que recebe o número de LEDs como entrada. Você ligará myAddressableLed.setData(myAddressableLEDBuffer) para definir os dados de saída do led. Finalmente, você pode ligar to set the led output data myAddressableLed.start() para escrever a saída continuamente. Abaixo está um exemplo completo do processo de inicialização.
Note
C++ não possui um AddressableLEDBuffer, e usa um Array.
Definindo a faixa para uma cor¶
A cor pode ser definida como um led individual na faixa usando dois métodos: `` setRGB``, que aceita valores RGB como entrada e setHSV() na qual aceita valores HSV como entrada.
Usando valores RGB¶
RGB significa vermelho, verde e azul. Este é um modelo de cores bastante comum, pois é bastante fácil de entender. Os LEDs podem ser configurados com o setRGB um método que leva 4 argumentos: índice do LED, quantidade de vermelho, quantidade de verde, quantidade de azul. A quantidade de vermelho, verde e azul são valores inteiros entre 0 e 255.
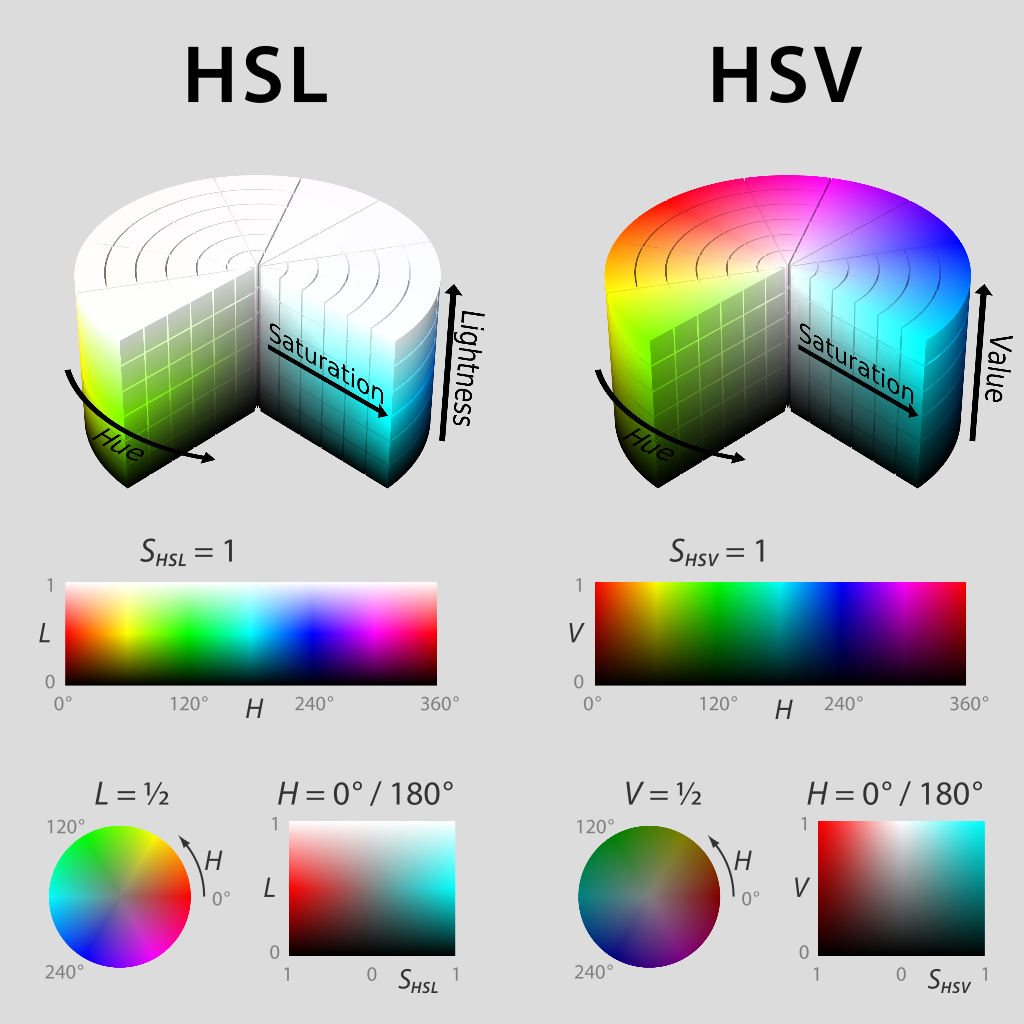
Usando valores HSV¶
HSV significa Matiz, Saturação e Valor. Matiz descreve a cor ou matiz, saturação sendo a quantidade de cinza e valor sendo o brilho. No WPILib, Hue é um número inteiro de 0 a 180. Saturação e Valor são números inteiros de 0 a 255. Se você observar um seletor de cores como Google’s, a matiz será de 0 a 360 e a saturação e o valor variam de 0% a 100%. É da mesma maneira que o OpenCV lida com cores HSV. Verifique se os valores HSV inseridos no WPILib estão corretos ou se a cor produzida pode não ser a mesma esperada.
Os LEDs podem ser configurados com o``setHSV`` método que utiliza 4 argumentos: índice do LED, matiz, saturação e valor. Um exemplo é mostrado abaixo para definir a cor de uma faixa de LED para vermelho (matiz de 0).
Criando um efeito arco-íris¶
O método abaixo faz algumas coisas importantes. Dentro do loop for, distribui igualmente o matiz por todo o comprimento do fio e armazena o matiz de LED individual em uma variável chamada hue. Em seguida, o loop for define o valor HSV desse pixel especificado usando o valor hue.
Movendo-se para fora do loop for, o m_rainbowFirstPixelHue itera o pixel que contém o matiz “inicial”, criando o efeito arco-íris. m_rainbowFirstPixelHue para verifica se a matiz está dentro dos limites da matiz de 180. Isso ocorre porque a matiz HSV é um valor de 0 a 180.
Note
É uma boa prática de robô manter o robotPeriodic() método o mais limpo possível, por isso, criaremos um método para lidar com a configuração de nossos dados de LED. Poderemos ligar o método rainbow() e ligar para robotPeriodic().
Agora que tem-se o nosso rainbow método criado, vamos ter que, na realidade, ligar o método e definar os dados do LED.